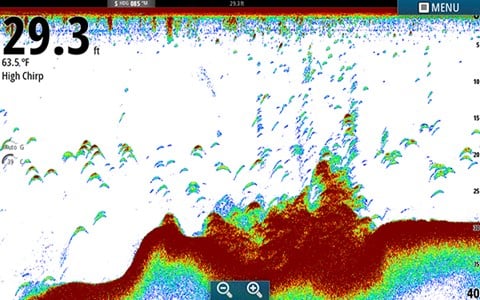
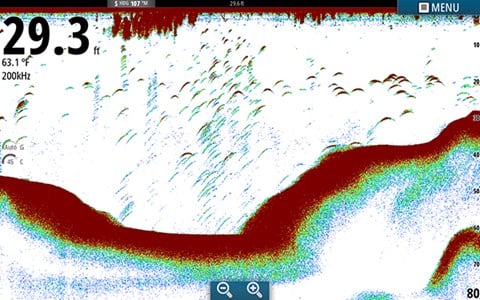
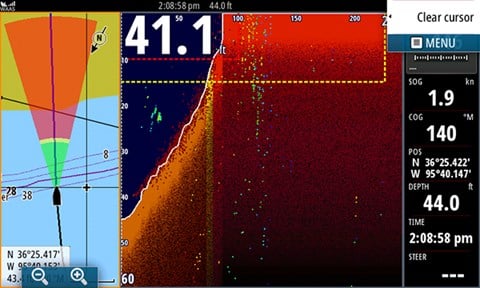
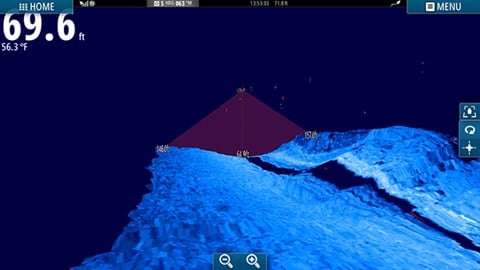
Tämä merkittävä luotaintekniikka soveltuu erinomaisesti syvyyden seurantaan, syöttikalaparven etsimiseen sekä saalistavan kalan tarkkailuun suoraan aluksen alla olevassa vesipylväässä. Broadband-luotain tuottaa perinteisen sivusuuntaisen kaikuluotainkuvan, johon muodostuu kalakaaria, kun kalat kulkevat alaspäin suuntautuvat luotainkeilan läpi.
Broadband-luotain käyttää yksitaajuuksisia ping-luotauspulsseja ja kaikuja käytössä olevan kaikuanturin mukaan. Useimmat kaikuanturit käyttävät jotakin alla mainituista taajuuksista. Kahta taajuutta käyttävissä kaikuantureissa voi valita kahdesta tuetusta taajuudesta tilanteeseen parhaiten sopivan.
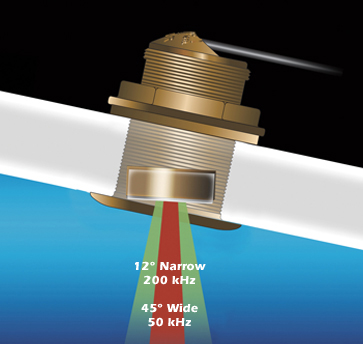
Käytettäviä taajuuksia ovat seuraavat:
- 50 kHz (matala taajuus)
Tehokas, soveltuu erinomaisesti pohjan seurantaan syvässä vedessä
- 83 kHz (keskikorkea taajuus)
Laaja kattavuus, kätevä kohteiden etsimiseen tai syötin seuraamiseen matalahkossa vedessä
- 200 kHz (korkea taajuus)
Erinomainen tarkkuus takaa parhaan kuvanlaadun ja helpottaa kalojen seuraamista matalassa vedessä
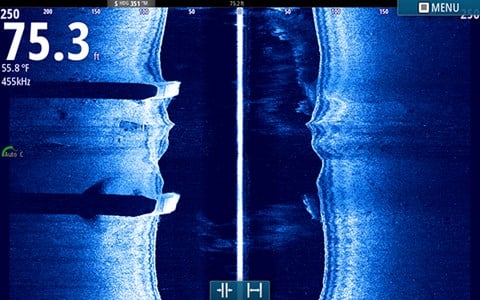
Miksi valita Simrad Broadband?
Mitä tehokkaamman ping-pulssin yksitaajuuksinen kaikuluotain lähettää, sitä voimakkaampia ovat pohjasta ja muista vedenalaisista kohteista vastaanotetut kaiut. Tämä voisi tarkoittaa parempaa syvyysmittausta ja kohteiden havaitsemiskykyä. Tehon lisääminen lisää kuvaan kuitenkin myös kohinaa, joka vaikeuttaa kohteiden havaitsemista näytössä. Simrad Broadband -luotain käyttää vähemmän tehoa, mutta vaihtelee ping-pulssia siten, että veteen siirtyy itse asiassa vielä enemmän energiaa. Näin kuvien laatu on parempi ja kohinaa on vähemmän kuin käytettäessä perinteistä yksitaajuuksista luotainta.